- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Hasiera
>
Produktuak > Egungo jarraipen unitatea > Egungo korrontearen jarraipen sentsorea > EV kargagailuaren piezak hondakinen uneko jarraipen unitatea







EV kargagailuaren piezak hondakinen uneko jarraipen unitatea
Xinnongo lanbide profesionala da kargagailuaren piezak egungo jarraipen unitateen fabrikatzailea eta hornitzaileak urte asko dituzten esperientzia. EV kargagailuaren piezak Egungo jarraipen unitateak aplikazio asko bete ditzakezu, orain kontsultatu gaitezke orain, eta zure esku utziko dizkizugu. Sistema akastuna arriskutsua izan daiteke pertsonentzat edo suteak sor ditzake. Orain arte iritsi aurretik, potentzia moduluak saretik deskonektatu behar dira. Ihes-korronteak DC eta AC osagaiak ditu. Hori dela eta, beharrezkoa da AC / DC-rekin sentikorreko jarraipen unitate bat.
Eredua:XKCA-01-MD
Bidali kontsulta
Produktuaren Deskribapena
Xinnong EV kargagailuaren piezak hondakinen uneko jarraipen unitateko fabrikatzailea eta hornitzailea da, kalitatearen zerbitzurako ezaguna da. Wenzhou Xinnong Import & Export Co., Ltd. ikerketa, ekoizpen eta salmenta zientifikoa integratzen duen enpresa berritzailea da. Konpainiaren salmenta sareak Europa eta Hego-ekialdeko Asia bezalako herrialde eta eskualde asko ditu, eta bere produktuen kalitatea eta zerbitzua bezeroek harrera ona dute. Asegurari eutsi ahal diozu EV kargagailuaren piezak Erosi Gurekin.
Xkca serieko hondar indarrean dagoen detekzio modulua oso aplikagarria da, batez ere ibilgailu elektrikoetarako kargatzeko estazio publikoetan, moto elektrikoak, bizikleta elektrikoak, kargatzeko kuotak eta energia segurtasun kudeaketa. Erabilera sinplea eta instalazio erraza eskaintzen ditu.
Osau
■ Hornidura bakarra +5 v
■ Drain irekiko irteera digital bikoitza, 20mac / 6Madc Bidaia Adierazpena
■ 3-faseko zuzendari nagusiak moduluan (32a, 40a. Gehienez)
■ PWM irteera DC hondakinen uneko balioaren adierazpena (0 ~ 30ma)
■ Errorearen irteera sistemaren akats adierazpena
■ PCB taulan muntatuta
■ Auto-test funtzioa
Eska
■ Beheko akatsen detekzioa
■ Ibilgailuen karga elektrikoa
■ Bihurgailuak ihesaren uneko detekzioa
Kalitate
■ IEC 62752 hondakinen egungo baldintzak aplikagarria
■ RDC-PDrako IEC 62955 hondakinen egungo baldintzak aplikagarriak
■ UL2231 egungo egungo baldintzak aplikagarriak
■ Osagaiak beteta / Reach beteta diseinatutako osagaiak

Produktuaren gainkina
Aplikazio eskema tipikoa:
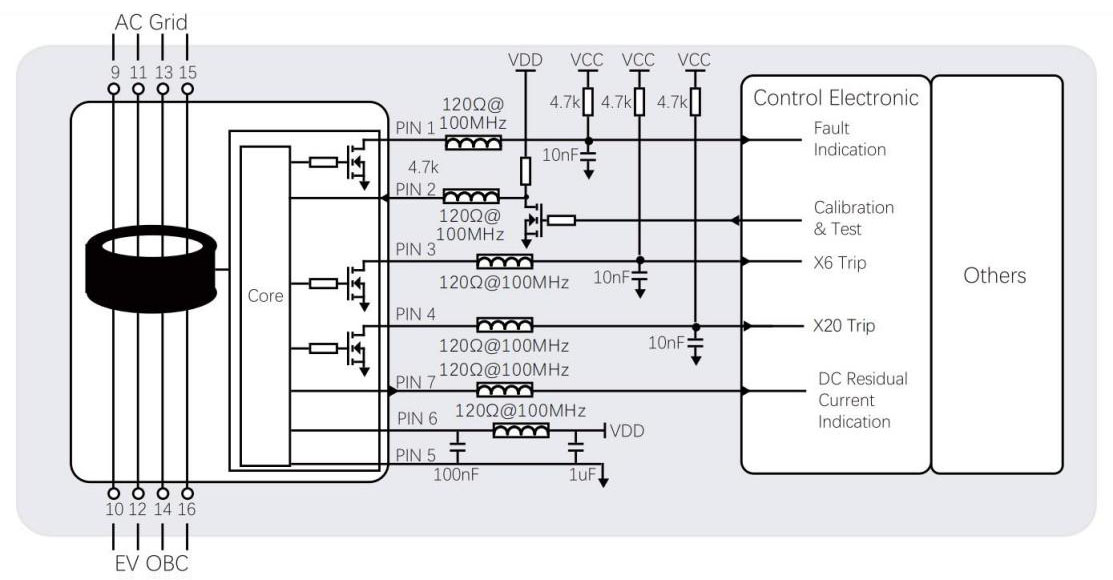
Pin Definizioa:
| Pin-Ez | PIN izena | Funtzionatu |
| 1 | Errakuntza | ■ Collector Open-Collector Futput PINa sistemaren akats egoera adierazteko ■ Sistemaren errua ez denean, PIN hau GND-ra egingo da ■ Sistemaren akatsa gertatu zenean, pin hau ezarriko da |
| 2 | Proba-in | ■ Pin hau 0VDC-ra egin denean, moduluak zero puntuko deriba kalkulatuko du eta MCUn erregistratzeko balioa gordetzen du kalibrazio operazioa amaitzeko. ■ Kalibrazioa amaitu ondoren, sistemak barrutik simulatutako hondar korrontea sortuko du, moduluak erantzun zuzena egin dezakeen ala ez egiaztatzeko. Prozedura honetan, X20-Out & X6-Out-ek ezbehar handia izango du modulua zuzena bada. Arreta: ■ Test-in funtzioa erabiltzen denean, zirkuitu nagusia moztu egin behar da, hondar korrontearen fluxua ez izateko ■ PIN funtzio hau erabiltzen duzunean, jarraitu denbora-diagramaren irudia |
| 3 | X6-Out | ■ Hondakinen korronteak aurrez ezarritako DC Trippling balioa gainditzen badu (modulu honetarako 4.5 MADC), irteera hori ezarritako egoeran dago ■ Egungo hondarreko uneko r.m.s-ek aurrez ezarritako korronte guztietako tripulazio-balioa gainditzen duenean, irteera hori ezarritako egoeran dago ■ Sistemaren akatsa gertatzen denean, irteera hori ezarritako egoeran dago ■ Beste baldintza normal batzuetarako, irteera hau maila baxuan dago (GND) |
| 4 | X20-Out | ■ Hondakinen korronteak aurrez ezarritako korronte guztiaren balioa gainditzen badu (pure-ac-a 17,8 MAAC), irteera hori ezarritako egoeran dago ■ Sistemaren akatsa gertatzen denean, irteera hori ezarritako egoeran dago ■ Beste baldintza normal batzuetarako, irteera hau maila baxuan dago (GND) |
| 5 | Gnd | ■ lurra |
| 6 | Vdd | ■ Moduluaren hornidura, tentsio estandarra 5VDC ■ Tentsioko sarrera 4.85 ~ 5.15VDC, energia irteerako gaitasuna> 100ma ■ Hornidura hornidura ≤ 150mv (Ldo Zirkuitua erabiltzea gomendatzen da, IC LP2985A-50DB erreferentziarako) |
| 7 | Pwm | ■ DCren egungo osagaia betebeharra duten 8 khz pwm-rekin adieraziz ■ Irteerako bereizmena =% 3,33 / madc 0 ~ 30madc-tik ■ Zehaztasuna ± 0,5MA |
| 8 | N.c. | ■ Ez da erabiltzen |
Ezaugarri elektrikoak / fidagarritasuna:
| Ail | Lau | Trukatu | Max | Unitate | |
| 1 | Lehen mailako RMS Korrontea (1fase / 3fase) | 32 | 40 | A | |
| 2 | Hornidura tentsioa | 4.85 | 5 | 5.15 | V |
| 3 | Giroaren funtzionamenduaren tenperatura | -40 | +105 | ℃ | |
| 4 | Giroaren biltegiratze tenperatura | -20 | +65 | ℃ | |
| 5 | Potentzia estatikoaren kontsumoa | 110 | mw | ||
| 6 | Leku elektrikoa; lehen mailako lehen mailako | 6.5 | mm | ||
| 7 | Leku elektrikoa; lehen mailako bigarren mailakoa | 10 | mm | ||
| 8 | Murrizketa distantzia; lehen mailako lehen mailako | 8 | mm | ||
| 9 | Murrizketa distantzia; lehen mailako bigarren mailakoa | 10 | mm | ||
| 10 | Tentsio sarrera, maila baxua | 0 | 0.6 | V | |
| 11 | Tentsio sarrera, maila altua | 4.2 | 5 | V | |
| 12 | Diseinu teorikoaren bizitza | 20 | Y | ||
| 13 | Eragiketa altitudea | 4000 | m |
Bidaia-korrontea (hondakinen inguruko erlazionatutako ezaugarriak):
| Wav | Freq | Lau | Trukatu | Max | Unitate | |
| 1 | Akuluri | 50hz | 15 | 17.8 | 20 | Mari |
| 2 | A0 | 50hz | 11 | 17 | 26 | Mari |
| 3 | A90 | 50hz | 10 | 18.5 | 27 | Mari |
| 4 | A135 | 50hz | 10 | 22.9 | 28 | Mari |
| 5 | 2pdc | - | 3.5 | 5.0 | 7 | Mari |
| 6 | 3pdc | - | 3.1 | 4.5 | 6.2 | Mari |
| 7 | S-DC | - | 3.0 | 4.5 | 6.0 | Mari |
Trip-Time (hondar indarreko ezaugarriak):
| Wav | Freq | Korronte | Trukatu | Max | Unitate | |
| 1 | Akuluri | 50hz | 30ma | 50 | 1000 | m ms |
| 2 | Akuluri | 50hz | 60ma | 16 | 100 | m ms |
| 3 | Akuluri | 50hz | 150ma | 15 | 60 | m ms |
| 4 | Akuluri | 50hz | 5a ~ 100a | 8.5 | 60 | m ms |
| 5 | A0 | - | 42ma | 25 | 100 | m ms |
| 6 | A0 | - | 84ma | 18 | 60 | m ms |
| 7 | A0 | - | 210MA | 10 | 60 | m ms |
| 8 | A0 + DC | - | 42ma + 6madc | 18 | 60 | m ms |
| 9 | A0 + DC | - | 84MA + 6MADC | 15 | 60 | m ms |
| 10 | A0 + DC | - | 210ma + 6madc | 15 | 60 | m ms |
| 11 | S-DC | - | 6mA | 48 | 1000 | m ms |
| 12 | S-DC | - | 60ma | 16 | 100 | m ms |
| 13 | S-DC | - | 300MA | 8.5 | 60 | m ms |
| 14 | 2pdc / 3pdc | - | 60ma | 20 | 100 | m ms |
| 15 | 2pdc / 3pdc | - | 120ma | 15 | 60 | m ms |
| 16 | 2pdc / 3pdc | - | 300MA | 12 | 60 | m ms |
| 17 | 2pdc / 3pdc | - | 5a ~ 100a | 12 | 60 | m ms |
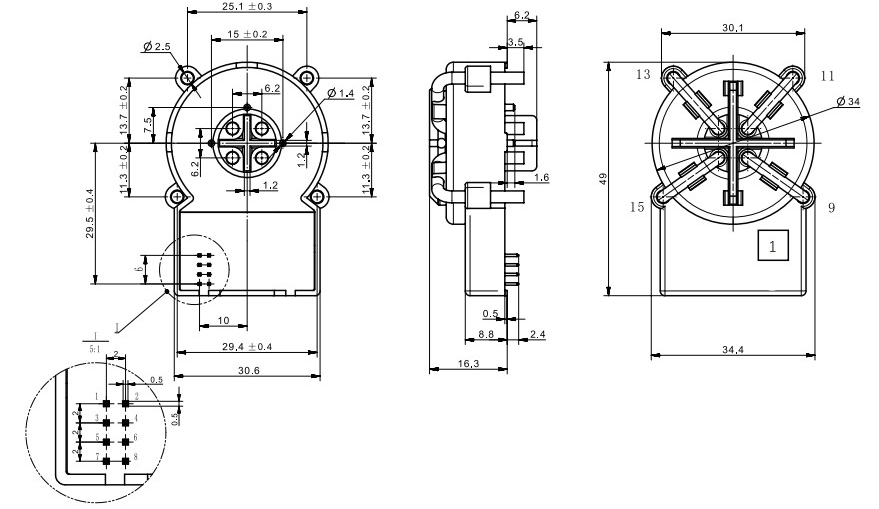
Produktuen dimentsioa (mm):
Denboralizazio-diagrama:
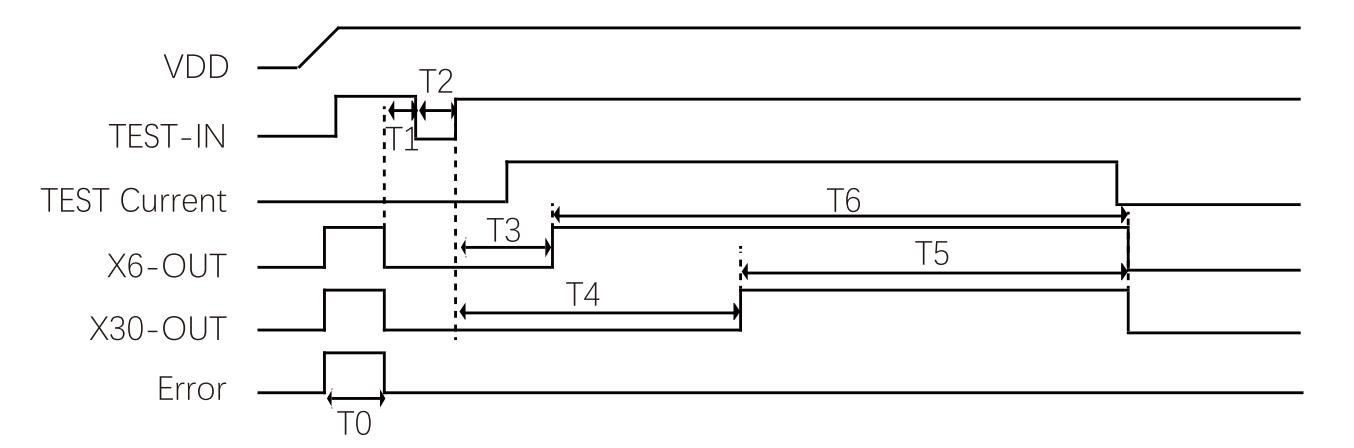
■ T0 sistemaren egonkortzeko itxarote denbora bezala, T0≈ 270ms
■ T1 itxarote denbora bezala, T1 ≥ 100ms iradokitzen da
■ T2 kalibrazio eta auto-probaren ordena bezala, 50ms ≤ T2 ≤ 100ms iradokitzen da
■ T3 Auto-test DC, T3≈ 200ms-en itxarote denbora bezala, 300ms ondoren X6-Out irakurtzea gomendatzen da
■ T4 Auto-testaren itxarote-denbora gisa, T4≈ 690ms, 300ms ondoren X30-out irakurtzea gomendatzen da
■ T5 AC Auto-Proba Adierazpen Iraupena Denbora, T5 ≈ 1580MS
■ T6 DC Auto-testaren Adierazpen Iraupena Denbora, T6 ≈ 1090MS
Auto-testaren zirkuitua:
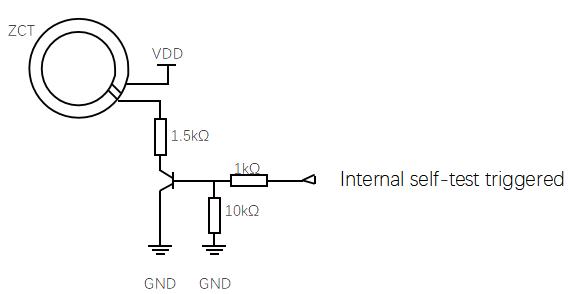
■ 2 ZCT-n zabalera Simualted DC hondar korrontea sortzeko
■ VDD erabilita, balio tipikoa = 6,53 MADC hondakin korronte simulatua
■ Egungo hau da, beharrezkoa da sistema zuzena den ala ez probatzeko
Seinale digitaleko flip atalasea:
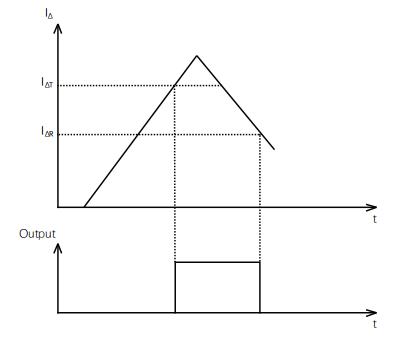
■ Seinale oszilazioa saihesteko, Tripping seinalea Irteera iraultzea tripulazio-atalasearekin eta berreskuratzeko atalasearekin ezarri da
■ Tripping atalasean  iritsi da, erlazionatutako X-ak iraultzea eta berreskuratzeko atalasean dagoen uneko gutxitzea
iritsi da, erlazionatutako X-ak iraultzea eta berreskuratzeko atalasean dagoen uneko gutxitzea  , erlazionatutako X-out iraultza berriro, maila baxuko egoerara itzuli
, erlazionatutako X-out iraultza berriro, maila baxuko egoerara itzuli
E ■  % 100eko tripulazio balio tipikoa da eta
% 100eko tripulazio balio tipikoa da eta  % 55eko tripulazio balio tipikoa da
% 55eko tripulazio balio tipikoa da
Hot Tags: EV kargagailuaren piezak hondakinen egungo jarraipen-unitatea, Txina, fabrikatzaileak, hornitzaileak, fabrika, Txinan egina, kalitatean, aurreratua
Lotutako Kategoria
Bidali kontsulta
Mesedez, eman lasai zure kontsulta beheko formularioan. 24 ordutan erantzungo dizugu.
Lotutako produktuak







